API documentation
Index
FEMBase.AbstractFieldFEMBase.AssemblyFEMBase.CVTVFEMBase.DCTIFEMBase.DCTVFEMBase.DVTIFEMBase.DVTIdFEMBase.DVTVFEMBase.DVTVdFEMBase.ElementFEMBase.ProblemFEMBase.ProblemFEMBase.ProblemFEMBasis.BasisInfoFEMBasis.BasisInfoFEMBasis.NSegBase.SparseArrays.sparseBase.haskeyBase.isapproxBase.lengthBase.sizeFEMBase.add!FEMBase.add!FEMBase.add!FEMBase.add!FEMBase.add_elements!FEMBase.assemble_elements!FEMBase.assemble_mass_matrix!FEMBase.fieldFEMBase.get_gdofsFEMBase.get_global_solutionFEMBase.get_integration_pointsFEMBase.get_local_coordinatesFEMBase.get_nonzero_rowsFEMBase.get_parent_field_nameFEMBase.get_unknown_field_dimensionFEMBase.get_unknown_field_nameFEMBase.get_unknown_field_nameFEMBase.group_by_element_typeFEMBase.initialize!FEMBase.insideFEMBase.optimize!FEMBase.resize_sparseFEMBase.resize_sparsevecFEMBase.update!FEMBase.update!FEMBase.update!FEMBase.update!FEMBasis.calculate_basis_coefficientsFEMBasis.calculate_interpolation_polynomial_derivativesFEMBasis.calculate_interpolation_polynomialsFEMBasis.eval_basis!FEMBasis.gradFEMBasis.gradFEMBasis.grad!FEMBasis.interpolateFEMBasis.interpolateFEMBasis.interpolateFEMBasis.interpolateFEMBasis.jacobianFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_pointsFEMQuad.get_quadrature_points
FEMBase.AbstractField — Type.AbstractFieldAbstract supertype for all fields in JuliaFEM.
FEMBase.Assembly — Type.General linearized problem to solve (K₁+K₂)Δu + C1'Δλ = f₁+f₂ C2Δu + DΔλ = g
FEMBase.CVTV — Type.CVTV <: AbstractFieldContinuous, variable, time variant field.
Example
julia> f = CVTV((xi,t) -> xi*t)
FEMBase.CVTV(#1)FEMBase.DCTI — Type.DCTI{T} <: AbstractFieldDiscrete, constant, time-invariant field.
This field is constant in both spatial direction and time direction, i.e. df/dX = 0 and df/dt = 0.
Example
julia> DCTI(1)
FEMBase.DCTI{Int64}(1)FEMBase.DCTV — Type.DCTV{T} <: AbstractFieldDiscrete, constant, time variant field. This type of field can change in time direction but not in spatial direction.
Example
Field having value 5 at time 0.0 and value 10 at time 1.0:
julia> DCTV(0.0 => 5, 1.0 => 10)
FEMBase.DCTV{Int64}(Pair{Float64,Int64}[0.0=>5, 1.0=>10])FEMBase.DVTI — Type.DVTI{N,T} <: AbstractFieldDiscrete, variable, time-invariant field.
This is constant in time direction, but not in spatial direction, i.e. df/dt = 0 but df/dX != 0. The basic structure of data is Tuple, and it is implicitly assumed that length of field matches to the number of shape functions, so that interpolation in spatial direction works.
Example
julia> DVTI(1, 2, 3)
FEMBase.DVTI{3,Int64}((1, 2, 3))FEMBase.DVTId — Type.DVTId(X::Dict)Discrete, variable, time invariant dictionary field.
FEMBase.DVTV — Type.DVTV{N,T} <: AbstractFieldDiscrete, variable, time variant field. The most general discrete field can change in both temporal and spatial direction.
Example
julia> DVTV(0.0 => (1, 2), 1.0 => (2, 3))
FEMBase.DVTV{2,Int64}(Pair{Float64,Tuple{Int64,Int64}}[0.0=>(1, 2), 1.0=>(2, 3)])FEMBase.DVTVd — Type.DVTVd(time => data::Dict)Discrete, variable, time variant dictionary field.
FEMBase.Element — Method.Element(element_type, connectivity_vector)Construct a new element where element_type is the type of the element and connectivity_vector is the vector of nodes that the element is connected to.
Examples
In the example a new element (E in the figure below) of type Tri3 is created. This spesific element connects to nodes 89, 43, 12 in the finite element mesh.
element = Element(Tri3, [89, 43, 12])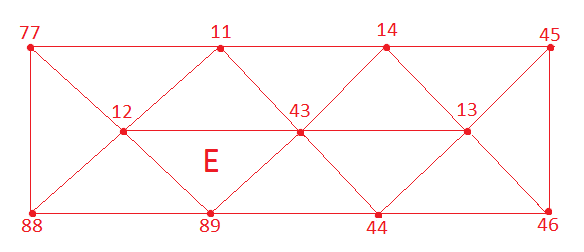
FEMBase.Problem — Type.Defines types for Problem variables.
Examples
The type of 'elements' is Vector{Element}
Add elements into the Problem element list.
a = [1, 2, 3]
Problem.elements = aFEMBase.Problem — Method.Problem(problem_type, problem_name::String, problem_dimension)Construct a new field problem where problem_type is the type of the problem (Elasticity, Dirichlet, etc.), problem_name is the name of the problem and problem_dimension is the number of DOF:s in one node (2 in a 2D problem, 3 in an elastic 3D problem, 6 in a 3D beam problem, etc.).
Examples
Create a vector-valued (dim=3) elasticity problem:
prob1 = Problem(Elasticity, "this is my problem", 3)FEMBase.Problem — Method.Construct a new boundary problem.
Examples
Create a Dirichlet boundary problem for a vector-valued (dim=3) elasticity problem.
julia> bc1 = Problem(Dirichlet, "support", 3, "displacement") solver.
FEMBase.add! — Function.Add new data to COO Sparse vector.
FEMBase.add! — Method.Add local element matrix to sparse matrix. This basically does:
A[dofs1, dofs2] = A[dofs1, dofs2] + data
Example
S = [3, 4] M = [6, 7, 8] data = Float64[5 6 7; 8 9 10] A = SparseMatrixCOO() add!(A, S, M, data) full(A)
4x8 Array{Float64,2}: 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 5.0 6.0 7.0 0.0 0.0 0.0 0.0 0.0 8.0 9.0 10.0
FEMBase.add! — Method.Add sparse matrix of CSC to COO.
FEMBase.add! — Method.Add SparseVector to SparseVectorCOO.
FEMBase.add_elements! — Method.add_elements!(problem::Problem, elements)Add new elements into the problem.
FEMBase.assemble_mass_matrix! — Method.assemble_mass_matrix!(problem, elements::Vector{Element{Tet10}}, time)Assemble Tet10 mass matrices using special method. If Tet10 has constant metric if can be integrated analytically to gain performance.
FEMBase.field — Method.field(x)Create new field. Field type is deduced from data type.
FEMBase.get_gdofs — Method.Return global degrees of freedom for element.
Notes
First look dofs from problem.dofmap, it not found, update dofmap from element.element connectivity using formula gdofs = [dim*(nid-1)+j for j=1:dim]
look element dofs from problem.dofmap
if not found, use element.connectivity to update dofmap and 1.
FEMBase.get_integration_points — Method.This is a special case, temporarily change order of integration scheme mainly for mass matrix.
FEMBase.get_local_coordinates — Method.Find inverse isoparametric mapping of element.
FEMBase.get_nonzero_rows — Method.Find all nonzero rows from sparse matrix.
Returns
Ordered list of row indices.
FEMBase.get_parent_field_name — Method.Return the name of the parent field of this (boundary) problem.
FEMBase.get_unknown_field_dimension — Method.get_unknown_field_dimension(problem)Return the dimension of the unknown field of this problem.
FEMBase.get_unknown_field_name — Method.Return the name of the unknown field of this problem.
FEMBase.get_unknown_field_name — Method.get_unknown_field_name(problem)Default function if unknown field name is not defined for some problem.
FEMBase.group_by_element_type — Method.group_by_element_type(elements::Vector{Element})Given a vector of elements, group elements by element type to several vectors. Returns a dictionary, where key is the element type and value is a vector containing all elements of type element_type.
FEMBase.initialize! — Method.function initialize!(problem_type, element_name, time)Initialize the element ready for calculation, where problem_type is the type of the problem (Elasticity, Dirichlet, etc.), element_name is the name of a constructed element (see Element(element_type, connectivity_vector)) and time is the starting time of the initializing process.
FEMBase.inside — Method.Test is X inside element.
FEMBase.optimize! — Method.Combine (I,J,V) values if possible to reduce memory usage.
FEMBase.resize_sparse — Method.Resize sparse matrix A to (higher) dimension n x m.
FEMBase.resize_sparsevec — Method.Resize sparse vector b to (higher) dimension n.
FEMBase.update! — Method.update!(problem, assembly, u, la)Update the problem solution vector for assembly.
FEMBase.update! — Method.update!(field, data)Update new value to field.
FEMBase.update! — Method.update!(problem, assembly, elements, time)Update a solution from the assebly to elements.
FEMBase.update! — Method.update!(problem.properties, attr...)Update properties for a problem.
Example
update!(body.properties, "finite_strain" => "false")FEMBasis.interpolate — Method.interpolate(a, b)A helper function for interpolate routines. Given iterables a and b, calculate c = aᵢbᵢ. Length of a can be less than b, but not vice versa.
FEMBasis.interpolate — Method.interpolate(element, field_name, time)Interpolate field field_name from element at given time.
Example
element = Element(Seg2, [1, 2])
data1 = Dict(1 => 1.0, 2 => 2.0)
data2 = Dict(1 => 2.0, 2 => 3.0)
update!(element, "my field", 0.0 => data1)
update!(element, "my field", 1.0 => data2)
interpolate(element, "my field", 0.5)
# output
(1.5, 2.5)
FEMBasis.interpolate — Method.interpolate(field, time)Interpolate field in time direction.
Examples
For time invariant fields DCTI, DVTI, DVTId solution is trivially the data inside field as fields does not depend from the time:
julia> a = field(1.0)
FEMBase.DCTI{Float64}(1.0)
julia> interpolate(a, 0.0)
1.0julia> a = field((1.0, 2.0))
FEMBase.DVTI{2,Float64}((1.0, 2.0))
julia> interpolate(a, 0.0)
(1.0, 2.0)julia> a = field(1=>1.0, 2=>2.0)
FEMBase.DVTId{Float64}(Dict(2=>2.0,1=>1.0))
julia> interpolate(a, 0.0)
Dict{Int64,Float64} with 2 entries:
2 => 2.0
1 => 1.0DVTId trivial solution is returned. For time variant fields DCTV, DVTV, DVTVd linear interpolation is performed.
Other notes
First algorithm checks that is time out of range, i.e. time is smaller than time of first frame or larger than last frame. If that is the case, return first or last frame. Secondly algorithm finds is given time exact match to time of some frame and return that frame. At last, we find correct bin so that t0 < time < t1 and use linear interpolation.
Base.SparseArrays.sparse — Method.Convert from COO format to CSC.
Parameters
tol used to drop near zero values less than tol.
Base.haskey — Method.Check existence of field.
Base.isapprox — Method.Approximative comparison of two matricse A and B.
Base.length — Method.length(element)Return the length of basis (number of nodes).
Base.size — Method.size(element)Return the size of basis (dim, nnodes).
FEMBase.assemble_elements! — Method.assemble_elements!(problem, assembly, elements, time)Assemble elements for problem.
This should be overridden with own assemble_elements!-implementation.
FEMBase.get_global_solution — Method.get_global_solution(problem, assembly)Return a global solution (u, la) for a problem.
Notes
If the length of solution vector != number of nodes, i.e. the field dimension is something else than 1, reshape vectors so that their length matches to the number of nodes. This helps to get nodal results easily.
FEMBasis.BasisInfo — Type.Data type for fast FEM.
FEMBasis.BasisInfo — Method.Initialization of data type BasisInfo.
Examples
BasisInfo(Tri3)
# output
FEMBasis.BasisInfo{FEMBasis.Tri3,Float64}([0.0 0.0 0.0], [0.0 0.0 0.0; 0.0 0.0 0.0], [0.0 0.0 0.0; 0.0 0.0 0.0], [0.0 0.0; 0.0 0.0], [0.0 0.0; 0.0 0.0], 0.0)
FEMBasis.NSeg — Type.NURBS segment.
FEMBasis.eval_basis! — Method.Evaluate basis, gradient and so on for some point xi.
Examples
b = BasisInfo(Quad4)
X = ((0.0,0.0), (1.0,0.0), (1.0,1.0), (0.0,1.0))
xi = (0.0, 0.0)
eval_basis!(b, X, xi)
# output
FEMBasis.BasisInfo{FEMBasis.Quad4,Float64}([0.25 0.25 0.25 0.25], [-0.25 0.25 0.25 -0.25; -0.25 -0.25 0.25 0.25], [-0.5 0.5 0.5 -0.5; -0.5 -0.5 0.5 0.5], [0.5 0.0; 0.0 0.5], [2.0 -0.0; -0.0 2.0], 0.25)
FEMBasis.grad! — Method.grad!(bi, gradu, u)Evalute gradient ∂u/∂X and store result to matrix gradu. It is assumed that eval_basis! has been already run to bi so it already contains all necessary matrices evaluated with some X and xi.
Example
First setup and evaluate basis using eval_basis!:
B = BasisInfo(Quad4)
X = ((0.0,0.0), (1.0,0.0), (1.0,1.0), (0.0,1.0))
xi = (0.0, 0.0)
eval_basis!(B, X, xi)
# output
FEMBasis.BasisInfo{FEMBasis.Quad4,Float64}([0.25 0.25 0.25 0.25], [-0.25 0.25 0.25 -0.25; -0.25 -0.25 0.25 0.25], [-0.5 0.5 0.5 -0.5; -0.5 -0.5 0.5 0.5], [0.5 0.0; 0.0 0.5], [2.0 -0.0; -0.0 2.0], 0.25)
Next, calculate gradient of u:
u = ((0.0, 0.0), (1.0, -1.0), (2.0, 3.0), (0.0, 0.0))
gradu = zeros(2, 2)
grad!(B, gradu, u)
# output
2×2 Array{Float64,2}:
1.5 0.5
1.0 2.0FEMBasis.grad — Method.grad(B, T, X, xi)Calculate gradient of T with respect to X in point xi using basis B.
Example
B = Quad4()
X = ([0.0, 0.0], [1.0, 0.0], [1.0, 1.0], [0.0, 1.0])
u = ([0.0, 0.0], [1.0, -1.0], [2.0, 3.0], [0.0, 0.0])
grad(B, u, X, (0.0, 0.0))
# output
2×2 Array{Float64,2}:
1.5 0.5
1.0 2.0
FEMBasis.grad — Method.grad(B, X, xi)Given basis B, calculate gradient dB/dX at xi.
Example
B = Quad4()
X = ([0.0, 0.0], [1.0, 0.0], [1.0, 1.0], [0.0, 1.0])
grad(B, X, (0.0, 0.0))
# output
2×4 Array{Float64,2}:
-0.5 0.5 0.5 -0.5
-0.5 -0.5 0.5 0.5
FEMBasis.interpolate — Method.interpolate(B, T, xi)Given basis B, interpolate T at xi.
Example
B = Quad4()
X = ((0.0, 0.0), (1.0, 0.0), (1.0, 1.0), (0.0, 1.0))
T = (1.0, 2.0, 3.0, 4.0)
interpolate(B, T, (0.0, 0.0))
# output
2.5
FEMBasis.jacobian — Method.jacobian(B, X, xi)Given basis B, calculate jacobian at xi.
Example
B = Quad4()
X = ([0.0, 0.0], [1.0, 0.0], [1.0, 1.0], [0.0, 1.0])
jacobian(B, X, (0.0, 0.0))
# output
2×2 Array{Float64,2}:
0.5 0.0
0.0 0.5
FEMBasis.calculate_basis_coefficients — Method.function calculate_basis_coefficients(polynomial::String, coordinates::Vararg{Tuple})Calculate "interpolate coefficient matrix" for some polynomial p.
Examples
That is, if we have polynomial p = 1 + u + v and coordinates (0,0), (1,0), (0,1), we find A*p such that first row is the first coordinate, second row is second coordinate and so on:
julia> p = "1 + u + w"
julia> X = ((0.0,0.0), (1.0,0.0), (0.0,1.0))
julia> calculate_basis_coefficient(p, X)
[1.0 0.0 0.0 # <-- p(0.0,0.0) = 1.0 = [1.0 0.0 0.0] * [1.0, u, v]
1.0 1.0 0.0 # <-- p(1.0,0.0) = 1.0 + u = [1.0 1.0 0.0] * [1.0, u, v]
1.0 0.0 1.0] # <- p(0.0,1.0) = 1.0 + v = [1.0 0.0 1.0] * [1.0, u, v]Calculate derivatives of basis functions with respect to parameters u, v, w.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 1 point rule on hexahedron.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 243 point rule on quadrilateral.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 27 point rule on hexahedron.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 81 point rule on hexahedron.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 8 point rule on hexahedron.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 5 point rule on pyramid.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 5 point rule on pyramid.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 16 point rule on quadrilateral.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 1 point rule on quadrilateral.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 25 point rule on quadrilateral.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 4 point rule on quadrilateral.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 9 point rule on quadrilateral.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 1 point rule on segment.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 2 point rule on segment.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 3 point rule on segment.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 4 point rule on segment.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 5 point rule on segment.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 15 point rule on tetrahedron.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 1 point rule on tetrahedron.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 4 point rule on tetrahedron.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 5 point rule on tetrahedron.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 12 point rule on triangle.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 1 point rule on triangle.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 3 point rule on triangle.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 3 point rule on triangle.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 4 point rule on triangle.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 4 point rule on triangle.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 6 point rule on triangle.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 7 point rule on triangle.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 21 point rule on wedge.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 6 point rule on wedge.
FEMQuad.get_quadrature_points — Method.Gauss-Legendre quadrature, 6 point rule on wedge.