Shape functions
Also known as basis functions, interpolation polynomials and so on. Typically unknown field variable is interpolated from element nodal values using continuous functions. That is,
Standard Lagrange polynomials as supported.
Linear shape functions:
Seg2
Tri3
Quad4
Tet4
Pyr5
Wedge6
Hex8
Quadratic and biquadratic shape functions:
Seg3
Tri6, Tri7
Quad8, Quad9
Tet10
Wedge15
Hex20, Hex27
NURBS shape functions:
NSeg
NSurf
NSolid
Evaluating basis and derivative of basis functions with respect to dimensionless coordinates:
using FEMBase
using FEMBase.FEMBasis: eval_dbasis!, jacobian, grad, interpolate,
get_reference_element_coordinates, create_basis
B = Quad4()FEMBasis.Quad4()length(B)4size(B)(2, 4)For fast evaluations, one must allocate array outside of the hot loops to get speed.
N = zeros(1, 4)
dN = zeros(2, 4)
xi = (0.0, 0.0)(0.0, 0.0)eval_basis!(B, N, xi)1×4 Array{Float64,2}:
0.25 0.25 0.25 0.25eval_dbasis!(B, dN, xi)2×4 Array{Float64,2}:
-0.25 0.25 0.25 -0.25
-0.25 -0.25 0.25 0.25For Langrange interpolation polynomials, by definition, on each node shape function corresponding to that node gets value of 1 and the rest is zero. Node ordering follows the same defined in e.g. in ABAQUS and in many other FEM softwares.
get_reference_element_coordinates(Quad4)((-1.0, -1.0), (1.0, -1.0), (1.0, 1.0), (-1.0, 1.0))for xi in get_reference_element_coordinates(Quad4)
eval_basis!(B, N, xi)
println("$N at $xi")
end[1.0 0.0 0.0 0.0] at (-1.0, -1.0)
[0.0 1.0 0.0 0.0] at (1.0, -1.0)
[0.0 0.0 1.0 0.0] at (1.0, 1.0)
[0.0 0.0 0.0 1.0] at (-1.0, 1.0)Mathematics
Without knowing anything about the real shape of domain, eval_dbasis! is calculating gradient with respect to dimensionless coordinates $\xi_i$, i.e.
\begin{equation} \frac{\partial\boldsymbol{N}}{\partial\boldsymbol{\xi}}=\left[\begin{array}{cccc} \frac{\partial N_{1}}{\partial\xi_{1}} & \frac{\partial N_{2}}{\partial\xi_{1}} & \cdots & \frac{\partial N_{n}}{\partial\xi_{1}}\ \frac{\partial N_{1}}{\partial\xi_{2}} & \frac{\partial N_{2}}{\partial\xi_{2}} & \cdots & \frac{\partial N_{n}}{\partial\xi_{2}}\ \frac{\partial N_{1}}{\partial\xi_{3}} & \frac{\partial N_{2}}{\partial\xi_{3}} & \cdots & \frac{\partial N_{n}}{\partial\xi_{3}} \end{array}\right] \end{equation}
Usually this is not wanted, but instead gradient of basis functions is calculated with respect to natural coordinates $X_i$,
\begin{equation} \frac{\partial\boldsymbol{N}}{\partial\boldsymbol{X}}=\left[\begin{array}{cccc} \frac{\partial N_{1}}{\partial X_{1}} & \frac{\partial N_{2}}{\partial X_{1}} & \cdots & \frac{\partial N_{n}}{\partial X_{1}}\ \frac{\partial N_{1}}{\partial X_{2}} & \frac{\partial N_{2}}{\partial X_{2}} & \cdots & \frac{\partial N_{n}}{\partial X_{2}}\ \frac{\partial N_{1}}{\partial X_{3}} & \frac{\partial N_{2}}{\partial X_{3}} & \cdots & \frac{\partial N_{n}}{\partial X_{3}} \end{array}\right] \end{equation}
To get this, inverse of Jacobian matrix is needed.
X = ([0.0, 0.0], [1.0, 0.0], [1.0, 1.0], [0.0, 1.0])
xi = (0.0, 0.0)
J = jacobian(B, X, xi)2×2 Array{Float64,2}:
0.5 0.0
0.0 0.5inv(J) * dN2×4 Array{Float64,2}:
-0.5 0.5 0.5 -0.5
-0.5 -0.5 0.5 0.5Or directly:
dNdX = grad(B, X, xi)2×4 Array{Float64,2}:
-0.5 0.5 0.5 -0.5
-0.5 -0.5 0.5 0.5If interpolation domain is manifold, Jacobian is not square and inverse cannot be taken.
X2 = ([0.0,0.0,0.0], [1.0, 0.0,1.0], [1.0,1.0,1.0], [0.0,1.0,0.0])
xi = (0.0, 0.0)
J = jacobian(B, X2, xi)2×3 Array{Float64,2}:
0.5 0.0 0.5
0.0 0.5 0.0One can use Jacobian to calculate surface integral:
\begin{equation} \iint_{S}f\,\mathrm{d}\Sigma=\iint_{T}f\left(\boldsymbol{x}\left(s,t\right)\right)\left\Vert \frac{\partial\boldsymbol{x}}{\partial s}\times\frac{\partial\boldsymbol{x}}{\partial t}\right\Vert \,\mathrm{d}s\mathrm{d}t \end{equation}
4*norm(cross(J[1,:], J[2,:])), sqrt(2) # area of manifold(1.4142135623730951, 1.4142135623730951)Gradient of e.g. displacement field or temperature field can be also evaluated:
u = ([0.0, 0.0], [1.0, -1.0], [2.0, 3.0], [0.0, 0.0])
T = (1.0, 2.0, 3.0, 4.0)
grad(B, u, X, xi)2×2 Array{Float64,2}:
1.5 0.5
1.0 2.0grad(B, T, X, xi)1×2 RowVector{Float64,Array{Float64,1}}:
0.0 2.0One can interpolate fields using basis:
interpolate(B, u, xi)2-element Array{Float64,1}:
0.75
0.5interpolate(B, T, xi)2.5At last to avoid unnecessary memory allocations, a struct BasisInfo is introduced, containing memory space for calculations.
bi = BasisInfo(Quad4)
eval_basis!(bi, X, xi)FEMBasis.BasisInfo{FEMBasis.Quad4,Float64}([0.25 0.25 0.25 0.25], [-0.25 0.25 0.25 -0.25; -0.25 -0.25 0.25 0.25], [-0.5 0.5 0.5 -0.5; -0.5 -0.5 0.5 0.5], [0.5 0.0; 0.0 0.5], [2.0 -0.0; -0.0 2.0], 0.25)bi.J2×2 Array{Float64,2}:
0.5 0.0
0.0 0.5bi.N1×4 Array{Float64,2}:
0.25 0.25 0.25 0.25bi.dN2×4 Array{Float64,2}:
-0.25 0.25 0.25 -0.25
-0.25 -0.25 0.25 0.25bi.detJ0.25bi.grad2×4 Array{Float64,2}:
-0.5 0.5 0.5 -0.5
-0.5 -0.5 0.5 0.5bi.invJ2×2 Array{Float64,2}:
2.0 -0.0
-0.0 2.0gradu = zeros(2, 2)
grad!(bi, gradu, u)2×2 Array{Float64,2}:
1.5 0.5
1.0 2.0Defining custom shape functions
Depending from the type of shape functions, they can be created more or less automatic way. For Lagrange type interpolation, ones needs only to define polynomial and corner points for domain. For example, if domain is $[0,1]^2$, one can use create_basis:
code = create_basis(
:MyQuad,
"My special domain",
(
(0.0, 0.0),
(1.0, 0.0),
(1.0, 1.0),
(0.0, 1.0),
),
"1 + u + v + u*v"
)
eval(code)B = MyQuad()
xi = (0.5, 0.5)
eval_basis!(B, N, xi)1×4 Array{Float64,2}:
0.25 0.25 0.25 0.25In this case partial derivatives of shape functions are with respect to $X$, because interpolation polynomials are calculated against real domain and not "reference domain":
eval_dbasis!(B, dN, xi)2×4 Array{Float64,2}:
-0.5 0.5 0.5 -0.5
-0.5 -0.5 0.5 0.5J = jacobian(B, X, xi)2×2 Array{Float64,2}:
1.0 0.0
0.0 1.0u = ([0.0, 0.0], [1.0, -1.0], [2.0, 3.0], [0.0, 0.0])
grad(B, u, X, xi)2×2 Array{Float64,2}:
1.5 0.5
1.0 2.0Shape functions can be defined manually and calculate partial derivatives automatically. C1-continuous Hermite shape functions can be defined as:
code = create_basis(
:C1Hermite,
"C1-continuous Hermite shape functions",
(
(0.0,),
(0.0,),
(1.0,),
(1.0,)
),
(
"2*u^3 - 3*u^2 + 1",
"u^3 - 2*u^2 + u",
"-2*u^3 + 3*u^2",
"u^3 - u^2"
)
)
eval(code)B = C1Hermite()
xi = (0.0,)
eval_basis!(B, N, xi)1×4 Array{Float64,2}:
1.0 0.0 0.0 0.0dN = zeros(1, 4)
eval_dbasis!(B, dN, xi)1×4 Array{Float64,2}:
0.0 1.0 0.0 0.0xi = (1.0,)
eval_basis!(B, N, xi)1×4 Array{Float64,2}:
0.0 0.0 1.0 0.0eval_dbasis!(B, dN, xi)1×4 Array{Float64,2}:
0.0 0.0 0.0 1.0The last option is to build everything from scratch. For that, one must import and define following functions:
Base.size
Base.length
FEMBase.FEMBasis.get_reference_element_coordinates
FEMBase.FEMBasis.eval_basis!
FEMBase.FEMBasis.eval_dbasis!
A simple implementation of P-hierarchical 1d-basis would then be
import Base: size, length
import FEMBase: get_reference_element_coordinates,
eval_basis!, eval_dbasis!,
AbstractBasis
type PSeg <: AbstractBasis
order :: Int
end
function PSeg()
return PSeg(1)
end
function length(basis::PSeg)
return basis.order+1
end
function size(basis::PSeg)
return (1, basis.order+1)
end
function get_reference_element_coordinates(basis::PSeg)
return ((-1.0,), (1.0,))
end
"""
get_legendre_polynomial(n)
Return Legendgre polynomial of order `n` to inverval ξ ∈ [1, 1].
Implementation uses Bonnet's recursion formula. See
https://en.wikipedia.org/wiki/Legendre_polynomials
"""
function get_legendre_polynomial(n)
n == 0 && return xi -> 1.0
n == 1 && return xi -> xi
Pm1 = get_legendre_polynomial(n-1)
Pm2 = get_legendre_polynomial(n-2)
A(xi) = (2.0*n-1.0)*xi*Pm1(xi)
B(xi) = (n-1.0)*Pm2(xi)
return xi -> (A(xi)-B(xi))/n
end
"""
get_legendre_polynomial_derivative(n)
Return derivative of Legendgre polynomial of order `n` to
inverval ξ ∈ [-1, 1]
"""
function get_legendre_polynomial_derivative(n)
n == 0 && return xi -> 0.0
n == 1 && return xi -> 1.0
Pm1 = get_legendre_polynomial_derivative(n-1)
Pm2 = get_legendre_polynomial_derivative(n-2)
A(xi) = (2.0*(n-1.0)+1.0)*xi*Pm1(xi)
B(xi) = (n+1.0-1.0)*Pm2(xi)
return xi -> (A(xi)-B(xi))/(n-1.0)
end
function eval_basis!{T}(basis::PSeg, N::Matrix{T}, xi::Tuple{T})
n = length(basis)
t = xi[1]
N[1] = 0.5*(1-t)
N[2] = 0.5*(1+t)
n < 3 && return N
for i=3:n
j = i-1
P1 = get_legendre_polynomial(j)
P2 = get_legendre_polynomial(j-2)
N[i] = 1.0/sqrt(2.0*(2.0*j-1.0))*(P1(t)-P2(t))
end
return N
end
function eval_dbasis!{T}(basis::PSeg, dN::Matrix{T}, xi::Tuple{T})
n = length(basis)
t = xi[1]
dN[1] = -0.5
dN[2] = 0.5
n < 3 && return N
for i=3:n
j = i-1
P1 = get_legendre_polynomial_derivative(j)
P2 = get_legendre_polynomial_derivative(j-2)
dN[i] = 1.0/sqrt(2.0*(2.0*j-1.0))*(P1(t)-P2(t))
end
return dN
endeval_dbasis! (generic function with 21 methods)B = PSeg()PSeg(1)N = zeros(1, 2)
eval_basis!(B, N, (0.0,))1×2 Array{Float64,2}:
0.5 0.5N = zeros(1, 3)
B.order = 2
eval_basis!(B, N, (0.0,))1×3 Array{Float64,2}:
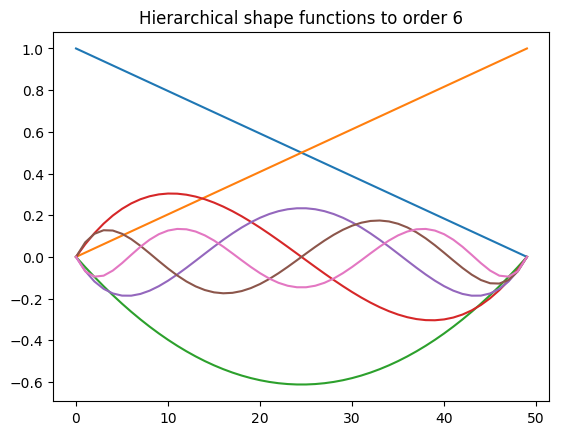
0.5 0.5 -0.612372using PyPlot
B.order = 6
N = zeros(1, length(B))
n = 50
xi = linspace(-1, 1, n)
NN = zeros(n, length(B))
for i=1:n
eval_basis!(B, N, (xi[i],))
NN[i,:] = N[:]
endplot(NN)
title("Hierarchical shape functions to order 6");